






Gambar diatas adalah penampakan dari IC L298, IC L298 itu sendiri adalah sebuah IC H-bridge
yang mampu mengendalikan beban-beban induktif seperti relay, solenoid, motor DC
dan motor stepper. IC L298 mempunyai 2 buah H-bridge di dalamnya sehingga bisa
mengendalikan kecepatan dan arah 2 buah motor DC dengan arus 2 Amps setiap
H-bridge nya. Kedua H bridge di dalam IC ini bisa di parallel untuk meningkatkan
kemampuan menopang arus mencapai 4 Amp.
Dalam penggunaan nya IC
L298 biasanya dipasangi heat sink untuk mecegah terjadinya over temperature. IC L 298 ini sering
digunakan untuk robot line follower, robot KRI ataupun KRCI karena praktis dan
melewatkan arus yang cukup besar.
Spesifikasi IC L298 :
-Tegangan operasi mencapai 46 volts
-Tegangan operasi mencapai 46 volts
-Mampu mengendalikan motor stepper bipolar 2 amps
-Mampu mengontrol arah motor DC dengan arus maks 2 amps setiap h-bridge
-Mampu mengendalikan motor DC 4 amp dengan memparalelkan kedua h-bridge di dalam IC L298
-Mendukung control PWM dengan frekuensi mencapai 20 KHZ
-Mempunyai sensor arus keluaran
-Mempunyai Proteksi over temperatureSupply voltage: +5 VDC
-Mampu mengendalikan motor DC 4 amp dengan memparalelkan kedua h-bridge di dalam IC L298
-Mendukung control PWM dengan frekuensi mencapai 20 KHZ
-Mempunyai sensor arus keluaran
-Mempunyai Proteksi over temperatureSupply voltage: +5 VDC
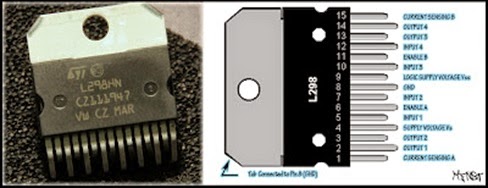
KONFIGURASI PIN IC L298

Keterangan
Input
1, input 2, input 3, input 4 dihubungkan ke mikrokontroler sebagai input
direksi
Enable
A, Enable B dihubungkan ke port OC pada mikro sebagai input PWM
Cur
Sen A, Cur Sen B dihubungkan ke ground
Logic
Supply Voltage Vss dihubungkan ke vcc mikro (5V)
Supply
Voltage Vs dihubungkan ke Catu Daya batere (12V)
Output
1, output 2, output 3, output 3 dihubungkan ke motor DC
Berikut
skematiknya

Untuk
source codenya saya menggunakan CVAVR dengan konfigurasi sbb:
Pada
wizard di blok TIMER kita atur untuk timer 1-nya, kenapa timer 1? Karena disini
saya menggunakan OCR1A dan OCR1B sebagai input PWM,

Dan untuk
programnya kita atur sbb :

Disini kita
definisikan OCR1A sebagai pwm1 dan OCR1B sebagai pwm2;

Lalu kita
atur DDRD=0X3F; karena port yang kita gunakan sebagai output direksi yaitu
PORTD.0 - PORTD.3, dan PORTD.4 dan PORTD.5 adalah output pwm di mikrokontroler.




0 komentar:
Posting Komentar